
It's a strange looking machine, and a lot of fun. There are more photos and information on the Yolo Makers Group blog, where I've been collaborating on CopperBot

 It's almost ready to roll! Here's yet another picture of the motor controller, this time with a four conductor ribbon cable attached to the control inputs. I also marked the power cable from the battery so there's less chance of hooking it up and mixing the polarity.
It's almost ready to roll! Here's yet another picture of the motor controller, this time with a four conductor ribbon cable attached to the control inputs. I also marked the power cable from the battery so there's less chance of hooking it up and mixing the polarity. configured in many ways, but I've picked the basic analog mode. In this mode the controller reads voltage levels and determines what to do.
configured in many ways, but I've picked the basic analog mode. In this mode the controller reads voltage levels and determines what to do.  to control, and even keeping at a slow speed I bumped a few things in the garage. The independant motor controls were not intuitive, especially when they were two random controls held in my hand.
to control, and even keeping at a slow speed I bumped a few things in the garage. The independant motor controls were not intuitive, especially when they were two random controls held in my hand. Once the motor controllers were given one last test, I screwed on the protective black covers and mounted the motors. I ran the new encoder signal cables through rubber grommets and holes through the side of the main bucket. The signal cables were left coiled up for hookup to a microcontroller later.
Once the motor controllers were given one last test, I screwed on the protective black covers and mounted the motors. I ran the new encoder signal cables through rubber grommets and holes through the side of the main bucket. The signal cables were left coiled up for hookup to a microcontroller later.

 Two spade connectors from the hardware store fit in the connector snugly, so I built a short pigtail set of wires that are secured to the controllers terminal screws on one end and plug into the batter cable on the other.
Two spade connectors from the hardware store fit in the connector snugly, so I built a short pigtail set of wires that are secured to the controllers terminal screws on one end and plug into the batter cable on the other. I'll wire the charger directly to the batteries, before the kill switch. That way I can cut the power feed to the motor controller, then plug in the charger and feed the batteries while the rest of the circuit is isolated.
I'll wire the charger directly to the batteries, before the kill switch. That way I can cut the power feed to the motor controller, then plug in the charger and feed the batteries while the rest of the circuit is isolated.
 I used the following parts from Mouser:
I used the following parts from Mouser:
 e is the second board getting it's smoke test in a prototype system. The IR LED is visible in the upper left, picked up by the camera sensor but normally invisible to the eye. The red LED on the right is driven by the end of a few feet of cable, which will eventually be monitored by the Arduino.
e is the second board getting it's smoke test in a prototype system. The IR LED is visible in the upper left, picked up by the camera sensor but normally invisible to the eye. The red LED on the right is driven by the end of a few feet of cable, which will eventually be monitored by the Arduino.

 The circuit board is resting on a felt furniture pad - a small chunk of adhesive backed felt that's used under table legs and such to protect your floor. It's sandwiched between the board and motor case by machine screws in the holes that previously mounted the brake.
The circuit board is resting on a felt furniture pad - a small chunk of adhesive backed felt that's used under table legs and such to protect your floor. It's sandwiched between the board and motor case by machine screws in the holes that previously mounted the brake. As rough as this looks, it works and should be rugged once I reinforce it with some epoxy.
As rough as this looks, it works and should be rugged once I reinforce it with some epoxy.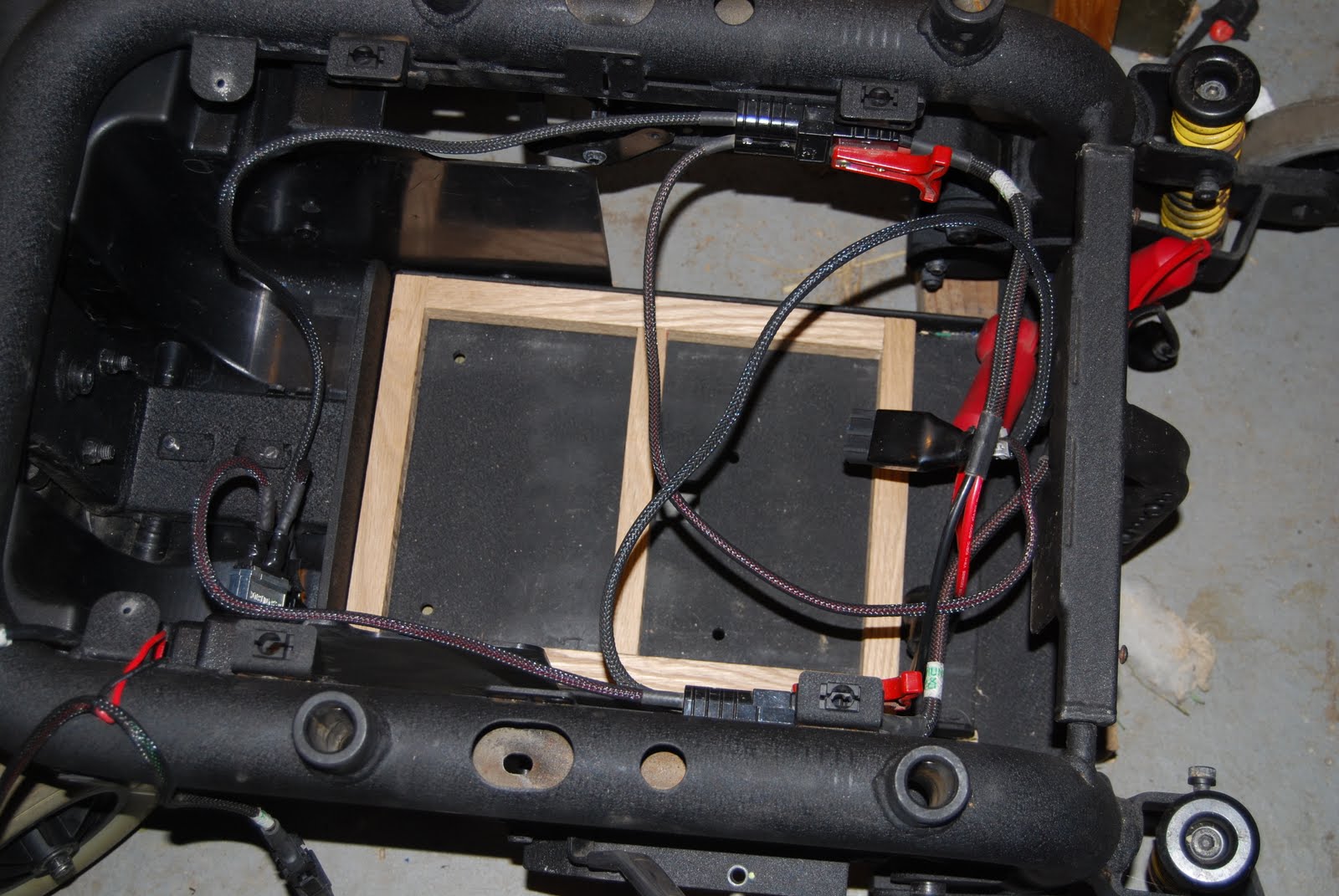 Making some progress ... I build a wooden frame so the batteries fit snug in the base. This is a H-shaped oak frame made from 3/4" wood.
Making some progress ... I build a wooden frame so the batteries fit snug in the base. This is a H-shaped oak frame made from 3/4" wood. g-nut holds it all tightly together so there's no wiggle room when it's all clamped down.
g-nut holds it all tightly together so there's no wiggle room when it's all clamped down.
{kind=link}